라이더(Lidar) 센서와 응용
김배경 주임
라이더 기본원리
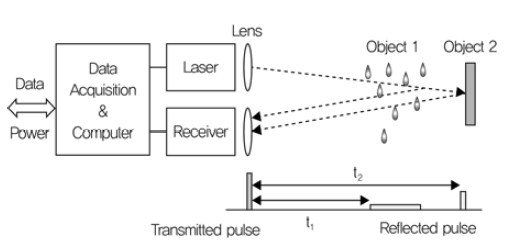
- 라이더는 크게 레이저 송신부, 수신부, 데이터 처리부로 구성되어 있습니다.
- 레이저 광원을 방출하여 목표물에서 튕겨 되돌아 오는 레이저의 속도를 계산하여 물체의 거리를 측정합니다.
- 파장이 짧은 레이저를 사용하므로 레이더보다 측정 정밀도와 공간 해상도가 높아, 물체 크기, 형태를 빠르게 파악할 수 있으며 레이저 빔을 광 시야각으로 확장할 경우 3D Scanning도 가능합니다.
라이더 특징
- 미세먼지 크기까지도 측정이 가능하기 때문에 레이저가 이동하는 동안 일정 크기 이하의 물체는 필터링이 가능합니다.
- 레이더 센서에 비해 감지 범위가 넓고 감지 반응 속도가 높습니다.
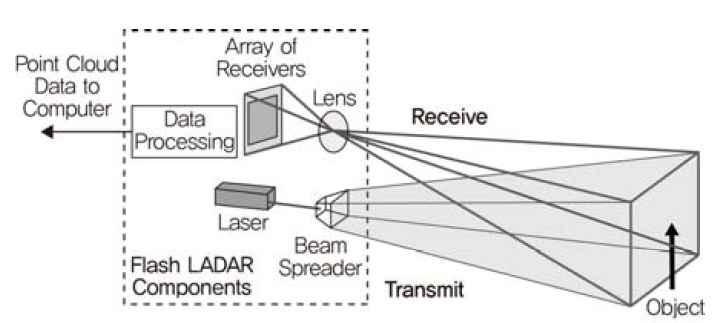
- 레이저가 여러 Layer로 방출되어 측정되고, 대개의 경우 각 Layer별로 감지 설정도 가능하며 입체적으로 물체의 형상도 확인 가능합니다.
- 날씨, 계절, 태양광의 영향을 받으므로 설치방법에 따라 환경의 영향을 받습니다.


Use Case : 현장 테스트
기차 선로 옆에서 크레인이 침범하는 경우에 대비해 감지 목표 물체를 크레인 붐과 후크로 설정하고 라이더 센서가 감지를 잘 하는지 현장에서 테스트를 했습니다.
배경
크레인의 붐과 후크가 선로 측에 침범하여 상부 전선 파손
목적
선로 측으로 침범하는 크레인의 모션을 미리 센싱하여 알람 혹은 제어로써 사전에 차단
방법
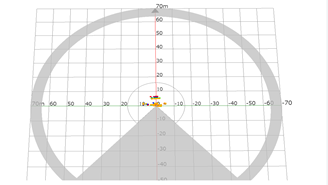
선로옆 3m 떨어진 거리에 센서설치 후 전방 50m 거리에서 크레인 감지 확인
결과
전방 50m, 높이 10m 이내의 거리에서 붐과 후크를 무리없이 감지하는 것을 확인
